刘明雨通过学位论文答辩
2026年5月27日,团队本科生刘明雨在通达馆315室顺利通过学位论文答辩,论文围绕“磁浮交通运行维护中的基于无人机的交通场景感知与目标跟踪研究”,取得了具有理论价值与实践意义的创新成果。指导教师为曾小清教授。
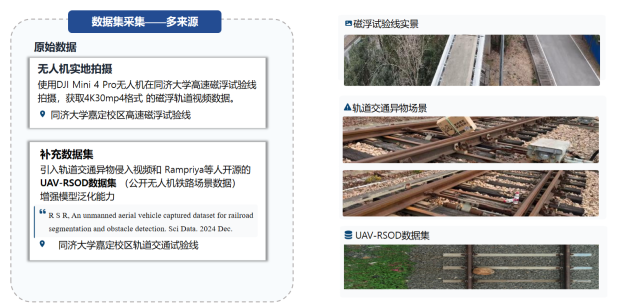
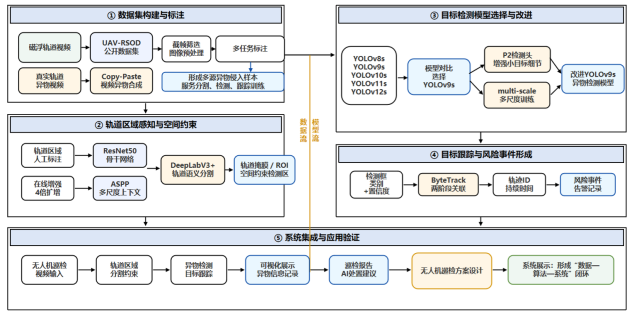
随着磁浮交通建设及运营规模日益增大,异物侵入、极端天气和人为干扰等安全风险日益突出,严重影响线路运行安全与运维效率。为此,磁浮交通运行维护对智能化巡检与快速感知能力提出了更高要求。该研究立足于磁浮交通运维场景,聚焦无人机巡检条件下的轨道区域感知、异物目标检测与连续跟踪协同识别,旨在提升磁浮线路沿线异物侵入目标的快速发现、精确定位与持续跟踪能力,具有部署灵活、覆盖范围广、成本较低、可推广性强等特点。论文主要完成了四方面工作:一是构建了面向磁浮无人机巡检的多源异物侵入数据集,融合实拍磁浮轨道、真实轨道异物、公开铁路场景数据与Copy-Paste合成样本;二是提出了基于DeepLabV3+的磁浮轨道区域感知方法,为异物检测提供空间约束并减少复杂背景干扰;三是设计了改进YOLOv9s目标检测方法,通过引入 P2 检测头和多尺度训练增强小尺度异物检测能力;四是建立了YOLOv9s-ByteTrack目标跟踪与系统集成方法,实现了巡检视频输入、结果可视化、异物信息记录和风险告警等功能。该研究通过数据构建、模型改进与系统验证,为磁浮交通在复杂开放环境下的无人机智能巡检提供了重要的技术支撑与方法借鉴,对提升磁浮线路异物侵入监测能力、保障运行安全和推动轨道交通运维智能化具有积极意义。


答辩会上,刘明雨就论文内容向答辩教师作了详细汇报,黄世泽、沈拓等答辩教师结合论文选题、数据集构建、模型改进、实验验证及工程应用等内容进行了提问,并提出了针对性的修改意见和完善建议。
曾小清教授课题组的研究方向为数智交通安保与环保技术,围绕智能交通、轨道交通控制与安全,从数学、软件工程、交通工程、土木工程到计算机科学全方位的综合交通系统工程。欢迎优秀学子报考、欢迎感兴趣的学者与企业进行合作交流。
联系方式:
zengxq@tongji.edu.cn
jiaotongkongzhi@163.com